It should be clearly understood that all surfaces have roughness, whether one can physically see it or not. Most of the surfaces that we consider to be smooth, such as the faces of a compact disc, have significant roughness when viewed at the right scale (micro- to nanoscale). Roughness is most commonly measured and described mathematically using the Root Mean Square, or RMS, value, which basically shows how the peaks and valleys are distributed above and below the profile’s centerline.
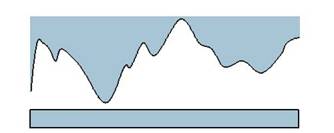
However, since it is difficult to model two rough surfaces that come into contact, a composite RMS roughness is calculated, which is, essentially, an averaged value of the roughness of the two surfaces. The two contacting rough surfaces can, in this way, be simulated as one rough surface with a composite roughness that comes into contact with a flat surface (whose roughness is zero). Greenwood and Williamson suggested that such as interface can be further simplified by simulating the peaks of the composite rough surface as spheres of an averaged radius Rin contact with a flat surface, as in Hertzian theory.
